Импульс
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ
Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: импульс тела, импульс системы тел, закон сохранения импульса.
Импульс тела — это векторная величина, равная произведению массы тела на его скорость:
\(\vec{p} = m\vec{\upsilon } \).
Специальных единиц измерения импульса нет. Размерность импульса — это просто произведение размерности массы на размерность скорости:
\([p]=[m]\cdot [\upsilon ]= \frac{\displaystyle kg\cdot m}{\displaystyle c}\).
Почему понятие импульса является интересным? Оказывается, с его помощью можно придать второму закону Ньютона несколько иную, также чрезвычайно полезную форму.
к оглавлению ▴
Пусть \(\vec{F} \) — равнодействующая сил, приложенных к телу массы \(m\). Начинаем с обычной записи второго закона Ньютона:
\(m\vec{a} =\vec{F} \).
С учётом того, что ускорение тела \(\vec{a} \) равно производной вектора скорости, второй закон Ньютона переписывается следующим образом:
\(m\frac{\displaystyle d\vec{\upsilon } }\displaystyle {dt}=\vec{F} \).
Вносим константу \(m\) под знак производной:
\(\frac{\displaystyle d(m\vec{\upsilon } )}{\displaystyle dt}= \vec{F} \).
Как видим, в левой части получилась производная импульса:
\(\frac{\displaystyle d\vec{\displaystyle p} }{\displaystyle dt}= \vec{F} \). ( 1)
Соотношение ( 1) и есть новая форма записи второго закона Ньютона.
Второй закон Ньютона в импульсной форме. Производная импульса тела есть равнодействующая приложенных к телу сил.
Можно сказать и так: результирующая сила, действующая на тело, равна скорости изменения импульса тела.
Производную в формуле ( 1) можно заменить на отношение конечных приращений:
\(\frac{\displaystyle \Delta \vec{\displaystyle p} }{\Delta \displaystyle t}= \vec{\displaystyle F} \). ( 2)
В этом случае \(\vec{F} \) есть средняя сила, действующая на тело в течение интервала времени \(\Delta t\). Чем меньше величина \(\Delta t\), тем ближе отношение \(\Delta \vec{p} /\Delta t\) к производной \(d\vec{p} /dt\), и тем ближе средняя сила \(\vec{F} \) к своему мгновенному значению в данный момент времени.
В задачах, как правило, интервал времени \(\Delta t\) достаточно мал. Например, это может быть время соударения мяча со стенкой, и тогда \(\vec{F} \) — средняя сила, действующая на мяч со стороны стенки во время удара.
Вектор \(\Delta \vec{p} \) в левой части соотношения ( 2) называется изменением импульса за время \(\Delta t\). Изменение импульса — это разность конечного и начального векторов импульса. А именно, если \(\vec{p} _{0}\) — импульс тела в некоторый начальный момент времени, \(\vec{p} \) — импульс тела спустя промежуток времени \(\Delta t\), то изменение импульса есть разность:
\(\Delta \vec{p} = \vec{p} -\vec{p} _{0}\).
Подчеркнём ещё раз, что изменение импульса — это разность векторов (рис. 1):
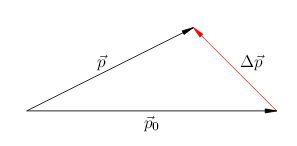 |
| Рис. 1. Изменение импульса |
Пусть, например, мяч летит перпендикулярно стенке (импульс перед ударом равен \(\vec{p} _{0}\) ) и отскакивает назад без потери скорости (импульс после удара равен \(\vec{p}= -\vec{p} _{0}\)). Несмотря на то, что импульс по модулю не изменился (\(p= p _{0}\)), изменение импульса имеется:
\(\Delta \vec{p} = \vec{p} -\vec{p} _{0}= -\vec{p} _{0}-\vec{p} _{0}= -2\vec{p} _{0}\).
Геометрически эта ситуация показана на рис. 2:
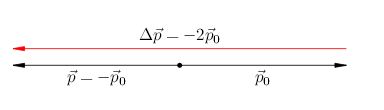 |
| Рис. 2. Изменение импульса при отскоке назад |
Модуль изменения импульса, как видим, равен удвоенному модулю начального импульса мяча: \(\Delta p= 2p_{0}\).
Перепишем формулу ( 2) следующим образом:
\(\Delta \vec{p} =\vec{F} \Delta t\), ( 3)
или, расписывая изменение импульса, как и выше:
\(\vec{p} -\vec{p} _{0}=\vec{F} \Delta t\).
Величина \(\vec{F} \Delta t\) называется импульсом силы. Специальной единицы измерения для импульса силы нет; размерность импульса силы равна просто произведению размерностей силы и времени:
\([F\Delta t]= [F]\cdot [t]= H\cdot c\).
(Обратите внимание, что \(H\cdot c\) оказывается ещё одной возможной единицей измерения импульса тела.)
Словесная формулировка равенства ( 3) такова: изменение импульса тела равно импульсу действующей на тело силы за данный промежуток времени. Это, разумеется, снова есть второй закон Ньютона в импульсной форме.
к оглавлению ▴
Пример вычисления силы
В качестве примера применения второго закона Ньютона в импульсной форме давайте рассмотрим следующую задачу.
Задача. Шарик массы \(m= 100\) г, летящий горизонтально со скоростью \(\upsilon = 6\) м/с, ударяется о гладкую вертикальную стену и отскакивает от неё без потери скорости. Угол падения шарика (то есть угол между направлением движения шарика и перпендикуляром к стене) равен \(\alpha = 60^{\circ}\). Удар длится \(\Delta t= 0,01\) с. Найти среднюю силу,
действующую на шарик во время удара.
Решение. Покажем прежде всего, что угол отражения равен углу падения, то есть шарик отскочит от стены под тем же углом \(\alpha \) (рис. 3).
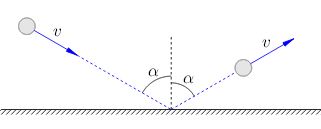 |
| Рис. 3. К задаче (вид сверху) |
Тут всё дело в том, что стена — гладкая. Это значит, что трения между шариком и стеной нет. Следовательно, со стороны стены на шарик действует единственная сила \(\vec{N} \) — сила упругости, направленная перпендикулярно стене (рис. 4).
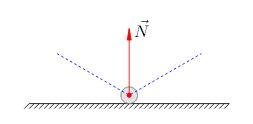 |
| Рис. 4. К задаче |
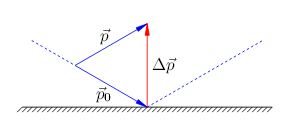
Согласно ( 3) имеем: \(\Delta \vec{p} = \vec{N} \Delta t\). Отсюда следует, что вектор изменения импульса сонаправлен с вектором \(\vec{N} \), то есть направлен перпендикулярно стене в сторону отскока шарика (рис. 5).
 |
| Рис. 5. К задаче |
Векторы \(\vec{p} _{0}\) и
\(\vec{p} \) равны по модулю
(так как скорость шарика не изменилась). Поэтому треугольник, составленный из векторов \(\vec{p} _{0}\), \(\vec{p} \) и \(\Delta \vec{p} \), является равнобедренным. Значит, угол между векторами \(\vec{p} \) и \(\Delta \vec{p} \) равен \(\alpha \), то есть угол отражения действительно равен углу падения.
Теперь заметим вдобавок, что в нашем равнобедренном треугольнике есть угол \(60^{\circ}\) (это угол падения); стало быть, данный треугольник — равносторонний. Отсюда:
\(\Delta p= p_{0}= m\upsilon = 0,1\cdot 6= 0,6~H\cdot c\).
И тогда искомая средняя сила, действующая на шарик:
\(N= \frac{\displaystyle \Delta p}{\displaystyle \Delta t}= \frac{\displaystyle 0,6}{\displaystyle 0,01}= 60~H\).
к оглавлению ▴
Импульс системы тел
Начнём с простой ситуации системы двух тел. А именно, пусть имеются тело 1 и тело 2 с импульсами \(\vec{p} _{1}\) и \(\vec{p} _{2}\) соответственно. Импульс \(\vec{p} \) системы данных тел — это векторная сумма импульсов каждого тела:
\(\vec{p} = \vec{p} _{1}+\vec{p} _{2}\).
Оказывается, для импульса системы тел имеется формула, аналогичная второму закону Ньютона в виде ( 1). Давайте выведем эту формулу.
Все остальные объекты, с которыми взаимодействуют рассматриваемые нами тела 1 и 2, мы будем называть внешними телами. Силы, с которыми внешние тела действуют на тела 1 и 2, называем внешними силами. Пусть \(\vec{F} _{1}\) — результирующая внешняя сила, действующая на тело 1. Аналогично \(\vec{F} _{2}\) — результирующая внешняя сила, действующая на тело 2 (рис. 6).
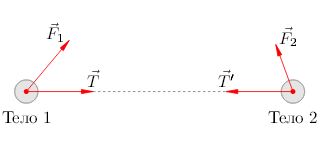 |
| Рис. 6. Система двух тел |
Кроме того, тела 1 и 2 могут взаимодействовать друг с другом. Пусть тело 2 действует на тело 1 с силой \(\vec{T} \). Тогда тело 1 действует на тело 2 с силой \({\vec{T} }'\). По третьему закону Ньютона силы \(\vec{T} \) и \({\vec{T} }'\) равны по модулю и противоположны по направлению: \({\vec{T} }'=-\vec{T} \). Силы \(\vec{T} \) и \({\vec{T} }'\) — это внутренние силы, действующие в системе.
Запишем для каждого тела 1 и 2 второй закон Ньютона в форме ( 1):
\(\frac{\displaystyle d\vec{\displaystyle p} _ {\displaystyle 1}}{\displaystyle dt}=\vec{F} _{1}+\vec{T} \), ( 4)
\(\frac{\displaystyle d\vec{\displaystyle p} _{\displaystyle 2}}{\displaystyle dt}=\vec{F} _{2}+{\vec{T}}' \). ( 5)
Сложим равенства ( 4) и ( 5):
\(\frac{\displaystyle d\vec{\displaystyle p} _{\displaystyle 1}}{\displaystyle dt}+\frac{\displaystyle d\vec{\displaystyle p} _{\displaystyle 2}}{\displaystyle dt}= \vec{F} _{1}+\vec{F} _{2}+\vec{T} +{\vec{T}}'\).
В левой части полученного равенства стоит сумма производных, равная производной суммы векторов \(\vec{p} _{1}\) и \(\vec{p} _{2}\). В правой части имеем \(\vec{T} +{\vec{T}}'= \vec{0}\) в силу третьего закона Ньютона:
\(\frac{\displaystyle d(\vec{\displaystyle p} _{\displaystyle 1}+\vec{\displaystyle p} _{\displaystyle 2})}{\displaystyle dt}= \vec{F} _{1}+\vec{F} _{2}\).
Но \(\vec{p} _{1}+\vec{p} _{2}= \vec{p} \) — это импульс системы тел 1 и 2. Обозначим также \(\vec{F} _{1}+\vec{F} _{2}= \vec{F} _{external}\) — это результирующая внешних сил, действующих на систему. Получаем:
\(\frac{d\vec{\displaystyle p} }{\displaystyle dt}= \vec{F} _{external}\). ( 6)
Таким образом, скорость изменения импульса системы тел есть равнодействующая внешних сил, приложенных к системе. Равенство ( 6), играющее роль второго закона Ньютона для системы тел, мы и хотели получить.
Формула ( 6) была выведена для случая двух тел. Теперь обобщим наши рассуждения на случай произвольного количества тел в системе.
Импульсом системы тел тел называется векторная сумма импульсов всех тел, входящих в систему. Если система состоит из \(N\) тел, то импульс этой системы равен:
\(\vec{p} = \vec{p} _{1}+\vec{p} _{2}+...+\vec{p} _{N}\).
Дальше всё делается совершенно так же, как и выше (только технически это выглядит несколько сложнее). Если для каждого тела записать равенства, аналогичные ( 4) и ( 5), а затем все эти равенства сложить, то в левой части мы снова получим производную импульса системы, а в правой части останется лишь сумма внешних сил (внутренние силы, попарно складываясь, дадут нуль ввиду третьего закона Ньютона). Поэтому равенство ( 6) останется справедливым и в общем случае.
к оглавлению ▴
Закон сохранения импульса
Система тел называется
замкнутой, если действия внешних тел на тела данной системы или пренебрежимо малы, или компенсируют друг друга. Таким образом, в случае замкнутой системы тел существенно лишь взаимодействие этих тел друг с другом, но не с какими-либо другими телами.
Равнодействующая внешних сил, приложенных к замкнутой системе, равна нулю: \(\vec{F} _{external}= \vec{0} \). В этом случае из ( 6) получаем:
\(\frac{\displaystyle d\vec{\displaystyle p} }{\displaystyle dt}= \vec{0} \).
Но если производная вектора обращается в нуль (скорость изменения вектора равна нулю), то сам вектор не меняется со временем:
\(\vec{p} = const\).
Закон сохранения импульса. Импульс замкнутой системы тел остаётся постоянным с течением времени при любых взаимодействиях тел внутри данной системы.
Простейшие задачи на закон сохранения импульса решаются по стандартной схеме, которую мы сейчас покажем.
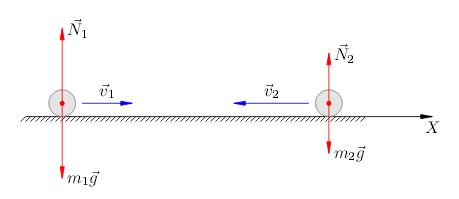
Задача. Тело массы \(m_{1}= 800\) г движется со скоростью \(\upsilon _{1}= 3\) м/с по гладкой горизонтальной поверхности. Навстречу ему движется тело массы \(m_{2}= 200\) г со скоростью \(\upsilon _{2}= 13\) м/с. Происходит абсолютно неупругий удар (тела слипаются). Найти скорость тел после удара.
Решение. Ситуация изображена на рис. 7. Ось \(X\) направим в сторону движения первого тела.
 |
| Рис. 7. К задаче |
Поскольку поверхность гладкая, трения нет. Поскольку поверхность горизонтальная, а движение происходит вдоль неё, сила тяжести и реакция опоры уравновешивают друг друга:
\(m_{1}\vec{g} +\vec{N} _{1}= \vec{0} \),
\(m_{2}\vec{g} +\vec{N} _{2}= \vec{0} \).
Таким образом, векторная сумма сил, приложенных к системе данных тел, равна нулю. Это значит, что система тел замкнута. Стало быть, для неё выполняется закон сохранения импульса:
\(\vec{p} _{before~hitting}= \vec{p} _{after~hitting}\). ( 7)
Импульс системы до удара — это сумма импульсов тел:
\(\vec{p} _{before~hitting}= m_{1}\vec{\upsilon _{1}} +m_{2}\vec{\upsilon _{2}} \).
После неупругого удара получилось одно тело массы \(m_{1}+m_{2}\), которое движется с искомой скоростью \(\vec{\upsilon } \):
\(\vec{p} _{after~hitting}= (m_{1}+m_{2})\vec{\upsilon } \).
Из закона сохранения импульса ( 7) имеем:
\(m_{1}\vec{\upsilon _{1}} +m_{2}\vec{\upsilon _{2}} = (m_{1}+m_{2})\vec{\upsilon } \).
Отсюда находим скорость тела, образовавшегося после удара:
\(\vec{\upsilon} = \frac{\displaystyle m_{\displaystyle 1}\vec{\displaystyle \upsilon _{\displaystyle 1}} +\displaystyle m_{\displaystyle 2}\vec{\displaystyle \upsilon _{\displaystyle 2}} }{\displaystyle m_{\displaystyle 1}+\displaystyle m_{\displaystyle 2}}\).
Переходим к проекциям на ось \(X\):
\(\upsilon _{x}= \frac{\displaystyle m_{\displaystyle 1}\displaystyle \upsilon _{\displaystyle 1x}+\displaystyle m_{\displaystyle 2}\upsilon _{\displaystyle 2x}}{\displaystyle m_{\displaystyle 1}+\displaystyle m_{\displaystyle 2}}\).
По условию имеем: \(\upsilon _{1x}= 3\) м/с, \(\upsilon _{2x}= -13\) м/с, так что
\(\upsilon _{x}= \frac{\displaystyle 0,8\cdot 3-0,2\cdot 13}{\displaystyle 0,8+0,2}= -0,2\frac{m}{c}\).
Знак минус указывает на то, что слипшиеся тела двигаются в сторону, противоположную оси \(X\). Искомая скорость: \(\upsilon = 0,2\) м/с.
к оглавлению ▴
Закон сохранения проекции импульса
Часто в задачах встречается следующая ситуация. Система тел не является замкнутой (векторная сумма внешних сил, действующих на систему, не равна нулю), но существует такая ось \(X\),
сумма проекций внешних сил на ось \(X\) равна нулю в любой момент времени. Тогда можно сказать, что вдоль данной оси наша система тел ведёт себя как замкнутая, и проекция импульса системы на ось
\(X\) сохраняется.
Покажем это более строго. Спроектируем равенство ( 6) на ось \(X\):
\(\frac{\displaystyle dp_{\displaystyle x}}{\displaystyle dt}= F_{external,x}\).
Если проекция равнодействующей внешних сил обращается в нуль, \(F_{external,x}= 0\), то
\(\frac{\displaystyle dp_{\displaystyle x}}{\displaystyle dt}= 0\).
Следовательно, проекция \(p_{x}\) есть константа:
\(p_{x}= const\).
Закон сохранения проекции импульса. Если проекция на ось \(X\) суммы внешних сил, действующих на систему, равна нулю, то проекция \(p_{x}\) импульса системы не меняется с течением времени.
Давайте посмотрим на примере конкретной задачи, как работает закон сохранения проекции импульса.
Задача. Мальчик массы \(M\), стоящий на коньках на гладком льду, бросает камень массы \(m\) со скоростью \(\upsilon \) под углом \(\alpha \) к горизонту. Найти скорость \(u\), с которой мальчик откатывается назад после броска.
Решение. Ситуация схематически показана на рис. 8. Мальчик изображён прямогольником.
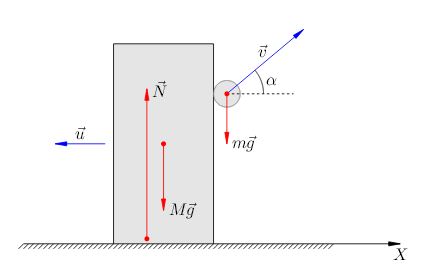 |
| Рис. 8. К задаче |
Импульс системы «мальчик + камень» не сохраняется. Это видно хотя бы из того, что после броска появляется вертикальная составляющая импульса системы (а именно, вертикальная составляющая импульса камня), которой до броска не было.
Стало быть, система, которую образуют мальчик и камень, не замкнута. Почему? Дело в том, что векторная сумма внешних сил \(M\vec{g} +m\vec{g} +\vec{N} \) не равна нулю во время броска. Величина \(N\) больше, чем сумма \(Mg+mg\), и за счёт этого превышения как раз и появляется вертикальная компонента импульса системы.
Однако внешние силы действуют только по вертикали (трения нет). Стало быть, сохраняется проекция импульса на горизонтальную ось \(X\). До броска эта проекция была равна нулю. Направляя ось \(X\) в сторону броска (так что мальчик поехал в направлении отрицательной полуоси), получим:
\(-Mu+m\upsilon _{0}\cos \alpha = 0\),
откуда
\(u=\frac{m\upsilon _{0}\cos \alpha }{M}\).